
最近のロボット技術は進化していますが、人間のように素早く自然に動くことは簡単ではありません。
その大きな理由のひとつが、シミュレーションと現実の世界の違いです。
カーネギーメロン大学(Carnegie Mellon University)の研究チームは、この問題を解決する新しい技術「ASAP(Aligning Simulation and Real Physics)」を開発しました。
ASAPは、シミュレーションと実際のロボットの動きのズレを調整し、よりスムーズな動作を可能にします。
その結果、本物のスポーツ選手の動きを、人型ロボットで再現できるようになりました。
目次
- 人型ロボットはスムーズに動けないのか?
- シミュレーションと現実のズレをなくす「ASAP」
人型ロボットはスムーズに動けないのか?

現在の人型ロボットは、シミュレーションの中で動作を学習し、それを現実で再現しようとします。
しかし、シミュレーションと現実の物理法則には違いがあるため、ロボットは思った通りに動けないことがあります。
例えば、シミュレーションでは上手に歩けても、実際にはバランスを崩して転んでしまうことがあります。
これまで、「ドメインランダム化(DR)」などの様々なアプローチが試されてきました。
しかし、これらの方法はパラメータを細かく調整するのに手間がかかったり、ロボットの動きを制限しすぎてしまったりして、俊敏な動きができなくなるという問題がありました。

そこで研究チームは、ロボットの運動能力を大幅に向上させるために、「ASAP」という技術を開発しました。
この技術を利用すると、人型ロボットにまるで本物の人間のような動きを与えることができます。
上記の動画では、NBAでバスケットボールの選手として活躍したコービー・ブライアント氏の動きを人型ロボットが見事に再現しています。
では、これほど俊敏な動きを再現できるASAPとはどんな技術なのでしょうか。
シミュレーションと現実のズレをなくす「ASAP」
ASAPは、シミュレーションと現実のズレを修正する「デルタアクションモデル」という新しい技術を使っています。
まず、ロボットは人間の動きをもとにシミュレーションの中で動作を学習します。
次に、その動きを実際のロボットに適用し、どのくらいズレが生じるのかを調べます。
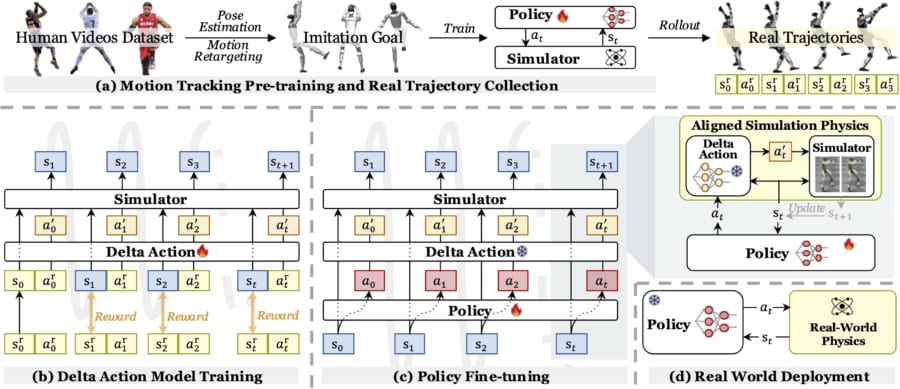
そして、このズレを補正するために、ロボットがどのように動けば良いのかを学習するモデルを作ります。
この補正モデルをシミュレーションに組み込むことで、より現実に近い動きを再現できるようになるのです。
最後に、最適化された動作モデルをロボットに適用します。
このアプローチにより、従来の方法よりもロボットの動きが正確になりました。
また、より素早く、より自然な動作を再現できるようになりました。
例えば、従来の技術で「キック」するよう指示すると、以下の動画のように、よろけてしまいます。
しかし、ASAPを導入すると、現実とシミュレーションのズレを補正できるため、以下の動画のように、よりスムーズなキックが行えるのです。
こうした進化によって、人型ロボットは一層人間に近づくことができました。
今後、家庭用ロボットや介護ロボット、災害救助ロボットなど、さまざまなロボットへのASAP導入が期待されます。
また、もしかしたら遠い将来、人間並みの俊敏さでスポーツをする人型ロボットが誕生するかもしれません。
私たちが「コービー・ブライアント氏のようなロボットたちの試合を観戦する」なんて状況もありえるのです。
参考文献
Video Friday: Agile Humanoids
https://spectrum.ieee.org/video-friday-agile-humanoids
ASAP Aligning Simulation and Real-World Physics for Learning Agile Humanoid Whole-Body Skills
https://agile.human2humanoid.com/
ライター
大倉康弘: 得意なジャンルはテクノロジー系。機械構造・生物構造・社会構造など構造を把握するのが好き。科学的で不思議なおもちゃにも目がない。趣味は読書で、読み始めたら朝になってるタイプ。
編集者
ナゾロジー 編集部

